




:为满足工业生产过程车间中的环境监视测定需求,提出了一种基于ARM核心单片机,气体传感器,温湿度传感器,摄像头和Wi-Fi图传模块,姿态传感器模块的车间环境监视测定机器人,并设计了其软硬件方案。机器人通过滑模控制器进行平衡底盘角度的镇定,PID控制器进行平衡底盘速度的镇定,保证了机器人底盘的通过性能。在实验室环境中进行实验。
摘要:实验验证表明,在复杂的工业生产车间环境中,该机器人能很好地通过复杂的车间环境,完成车间环境监视测定任务,并且将环境数据通过无线Wi-Fi模块回传给上位机,提供一种有效的车间无人监测方案,提升了工作效率,保证了人员和设备的安全。
在化工业、食品制造业、纺织工业中为保障仓储环境、工艺流程、设备性能等,对环境条件有一定要求,需要对车间的环境进行监测,以保证生产活动的正常进行[1-3]。在某些产业中,车间可能会产生一些污染物,对人员健康和设备造成损害,对这些污染物进行监测也非常必要[4]。
为解决以上问题,文献[5]设计了基于STM32 和阿里云的智能环境检验测试系统,但其采集节点相对固定,不够灵活。文献[6]设计了一种环境信息采集智能车,但其底盘使用履带,移动速度和效率低,体积大不适用于车间环境。文献[7]使用传感器网络进行监测,需布置大量传感器与服务器系统,成本比较高,不利于推广。
本文为解决以上问题,基于ARM内核微处理器,设计了车间环境监视测定机器人机器人使用二轮平衡底盘,具有高效率、灵活、移动速度快、通过性能强的优点。机器人搭载了气体传感器模块,温湿度传感器模块,摄像头和Wi-Fi 图传模块,姿态传感器模块。该机器人克服了以上缺点,具有很强的实用性,为工业生产提供了保障。
机器人系统总体结构如图1 所示,分为硬件层和软件层。其中,硬件层包括运动层,控制层,通信层和感知层。感知层最重要的包含监测采集环境信息的各种传感器,控制层为基于ARM核心的微控制器,运动层包括机器人运动的底盘电机等,通信层为Wi-Fi 图传模块。
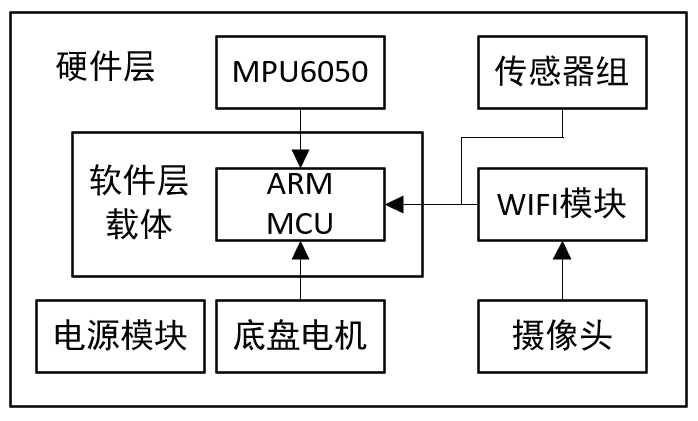
机器人系统主控采用基于ARM核心的STM32F407处理器,该系列MCU 有着非常丰富的外设接口和片上资源,突出的低功耗性能和丰富的开发例程。MCU 负责与机器人硬件各层次通信和控制。包括机器人的运动控制,电机电流指令发送,气体传感器,温湿度传感器数据的采集、处理,Wi-Fi 模块的数据上传控制。机体姿态传感器的数据采集和处理。
系统需要3.3 V,5 V 和24 V 三种规格的电源,故使用24 V 锂聚合物电池作为机器人系统的电力来源。系统的电源分为3 个层次:24 V 电源输入、TPS54540同步降压5 V 电源、MT2492 同步降压3.3 V 电源。系统电源树如图所示。
MT2492 为西安航天民芯公司开发的一款同步降压转换器,具有2 A 输出电流,通过反馈电阻网络配置输出电压,依据数据手册提供的计算公式,将反馈电阻网络配置为RHS= 67.5 kΩ,RLS=15 kΩ。
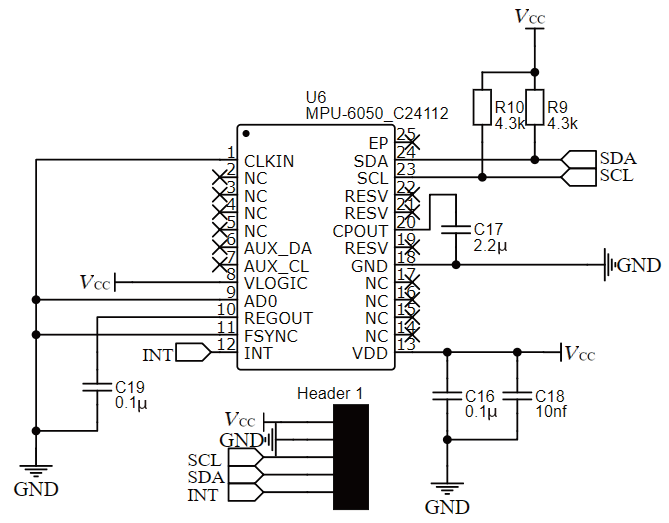
机器人采用了平衡底盘,为保持底盘平衡直立,需测量机器人底盘姿态。姿态传感器模块使用MPU6050芯片进行姿态检测。该芯片是InvenSense 公司的IMU(惯性测量单元)产品,能同时检测三轴加速度、角速度的运动数据及温度数据。利用官方提供的DMP 库可对传感器数据来进行处理,直接通过加速度和角速度的运动数据解算出三轴的欧拉角,直接获得底盘Yaw,Pitch,Roll 三轴的姿态数据。在芯片DMP 单元完成姿态数据解算后,会通过INT 引脚触发单片机中断,然后通过I2C 接口将数据发送给单片机,在中断服务函数中进行姿态传感器数据的接收。
机器人具有有害气体检测功能,可以实时监控车间有害气体浓度,有害气体检测使用了MQ135 气体检测模块。该传感器所使用的气敏材料是在清洁空气中电导率较低的二氧化锡(SnO2)。当传感器所处环境中存在污染气体时;传感器的电导率随空气中污染气体浓度的增加而增大。MQ135 传感器对氨气、硫化物、苯系蒸汽的灵敏度高,对烟雾和其它有害气体的监测也很理想。
通过集成的气体传感器模块检测电路即可将电导率的变化转换为与该气体浓度相对应的数字信号,通过电位器设置触发阈值,当有害气体浓度超过阈值后,模块输出高电平,单片机通过IO 直接读取模块信号输出。
为了保证生产需要,监测车间的温湿度,机器人搭载了DHT12 温湿度传感器模块,该模块为集成了微处理器的数字信号输出型传感器。在传感器内部同时集成了温度传感器,湿度传感器和1 个8 位的高性能单片机。传感器元件包括1 个电容式感湿元件和一个NTC 测温元件。该模块应用集成微处理器内部的模数转换器进行数据的采集,通过I2C 接口进行数据输出。该传感器模块成本低,可以同时进行相对湿度和温度测量,大大降低了机器人的生产成本。
机器人需要进行远程操控和数据上传,考虑到机器人在车间环境下工作,故选用Wi-Fi 摄像头图传模块,同时上传摄像头采集到的图像和机器人数据。摄像头图传模块采用ESP32-CAM,模块基于ESP32 微处理器,该处理器运算能力高达600DMIPS,该模块集成了Wi-Fi 图传,串口传输和摄像头,可以直接在上位机软件进行图像和上传数据的查看。模块采用802.1.1 通信标准,传输速度可以达到150 bit/s。该模块使用5 V 电源进行供电,串口波特率设置为115 200,机器人传感器数据上传使用串口进行传输,在使用时,将客户端接入模块的无线热点,启动模块配套的客户端即可。
数据直接以字符串形式进行传输,刷新频率为20 Hz,既保证了数据上传实时性,也避免占用过多上传信道带宽。在串口上传的数据中,/n 为数据的起始位,“有害气体”,“温度”,“湿度”为数据名称,数据名称后接数字即为该数据的值。
机器人系统的软件部分包括初始化程序,传感器数据采集程序,上位机数据上传程序,遥控程序,底盘控制程序。
因机器人软件包含多个线程,故软件系统基于Freertos 开发,通过Freertos 的时间片调度功能,实现毫秒级时间尺度上的并行处理。
软件初始化程序对单片机各个外设进行初始化,使各个传感器进入工作状态,初始化Freertos,运行各个线程。
传感器数据采集程序将各个传感器采集到的数据做处理,处理成字符串后通过串口发送到上位机。
遥控程序将通过串口采集的数据设置机器人底盘的运动状态,实现机器人底盘的运动控制。
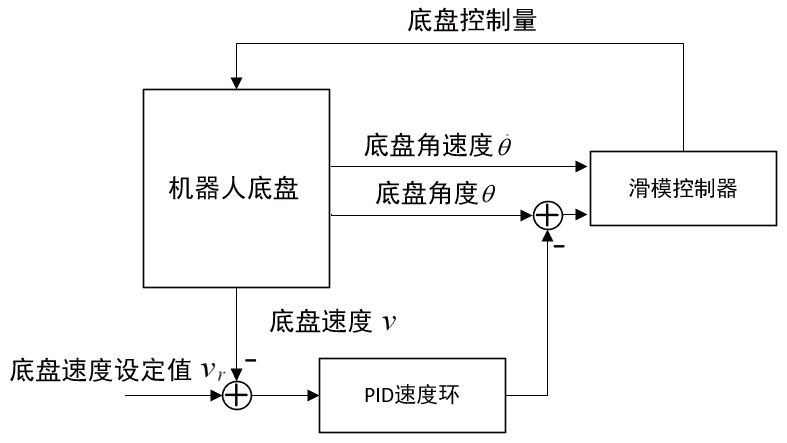
平衡底盘使用底盘控制器进行底盘的运动控制,为保证底盘的通过性能和稳定能力,采用了滑模控制和PID控制相结合的方法。底盘控制器采用滑模控制器进行平衡底盘角度的镇定,PID 控制器进行平衡底盘速度的镇定,滑模控制器和PID 控制器组成了一个串级结构。控制器结构框图如图5 所示。
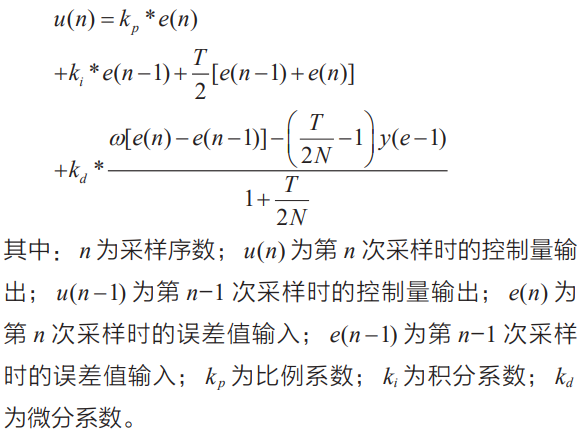
数字式PID 控制器可通过连续域的PID 控制器离散化得到,在此使用梯形法进行离散化得到。
为了对机器人的总体功能和通过性能做验证,选择了实验室环境对机器人功能进行验证。
首先对机器人的通过性能进行实验。模拟车间的道路环境,在机器人前进的路径上设置了高度为150 mm的落差,观察到的机器人运动姿态如图6 所示:
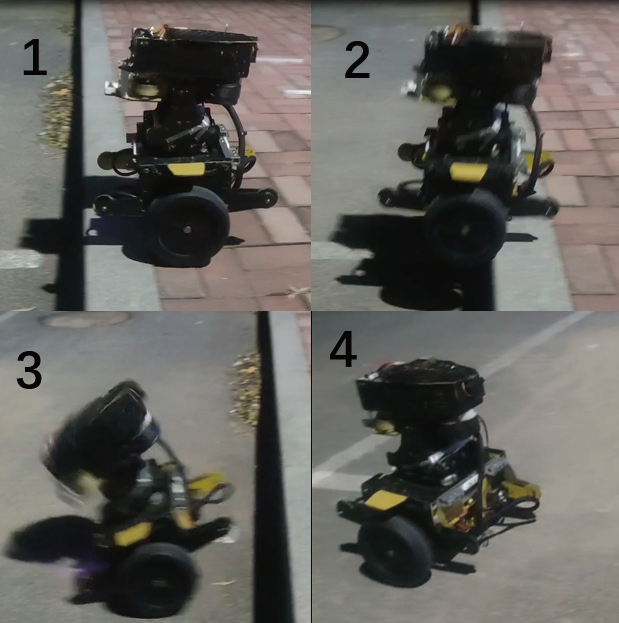
机器人在通过落差时,由于受到落差的干扰,姿态发生了偏移,接触地面后即很快恢复了直立稳定状态。
对机器人的数据采集功能来测试。将机器人通电后再将机器人置于实验室环境中来测试,通过Wi-Fi模块建立系统与上位机的联系,使机器人数据采集和上传功能处于正常工作状态。在上位机采集到的回传数据如图7 所示:
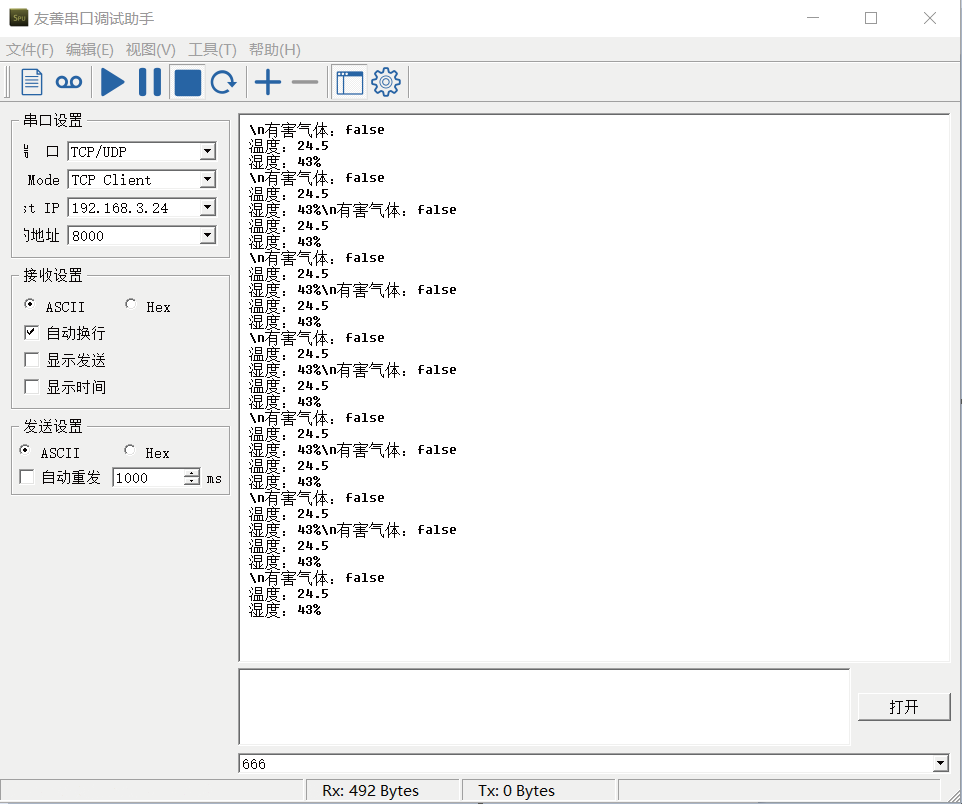
机器人通过Wi-Fi 模块的串口通信功能,将数据回传给机器人的上位机,实现了环境数据采集上传功能。
基于ARM 内核微处理器,设计了车间环境监视测定机器人的软硬件系统,经过实验验证,机器人底盘具有较强的通过性能,能适应复杂的车间环境。机器人通过搭载的传感器进行环境数据测量,能及时地回传采集到的数据,完成车间环境监视测定任务,具有很强的实用性,满足工业生产过程车间中的环境监视测定需求,为工业生产提供了保障。
[1] 黄鑫,王秋,李忠武.Zigbee监控网络下注塑机注塑性能稳定性及注塑产品质量[J].合成树脂及塑料,2017,34(2):73-76.
[7] 许家栋,张斌珍,王玮冰,等.一种基于无线传感器网络的车间多参数监测系统[J].传感器与微系统,2013,32(10):96-109.

